AUSGANGSLAGE
Eine Vielzahl von Unternehmen sieht sich mit Schwierigkeiten bei der Rekrutierung von Arbeitskräften konfrontiert, wobei insbesondere der Lagerbereich und die Produktionshalle betroffen sind. Die Automatisierung von Transportsystemen erlaubt eine Umverteilung der verfügbaren Arbeitskräfte auf andere Aufgabenbereiche.
LÖSUNGSANSATZ
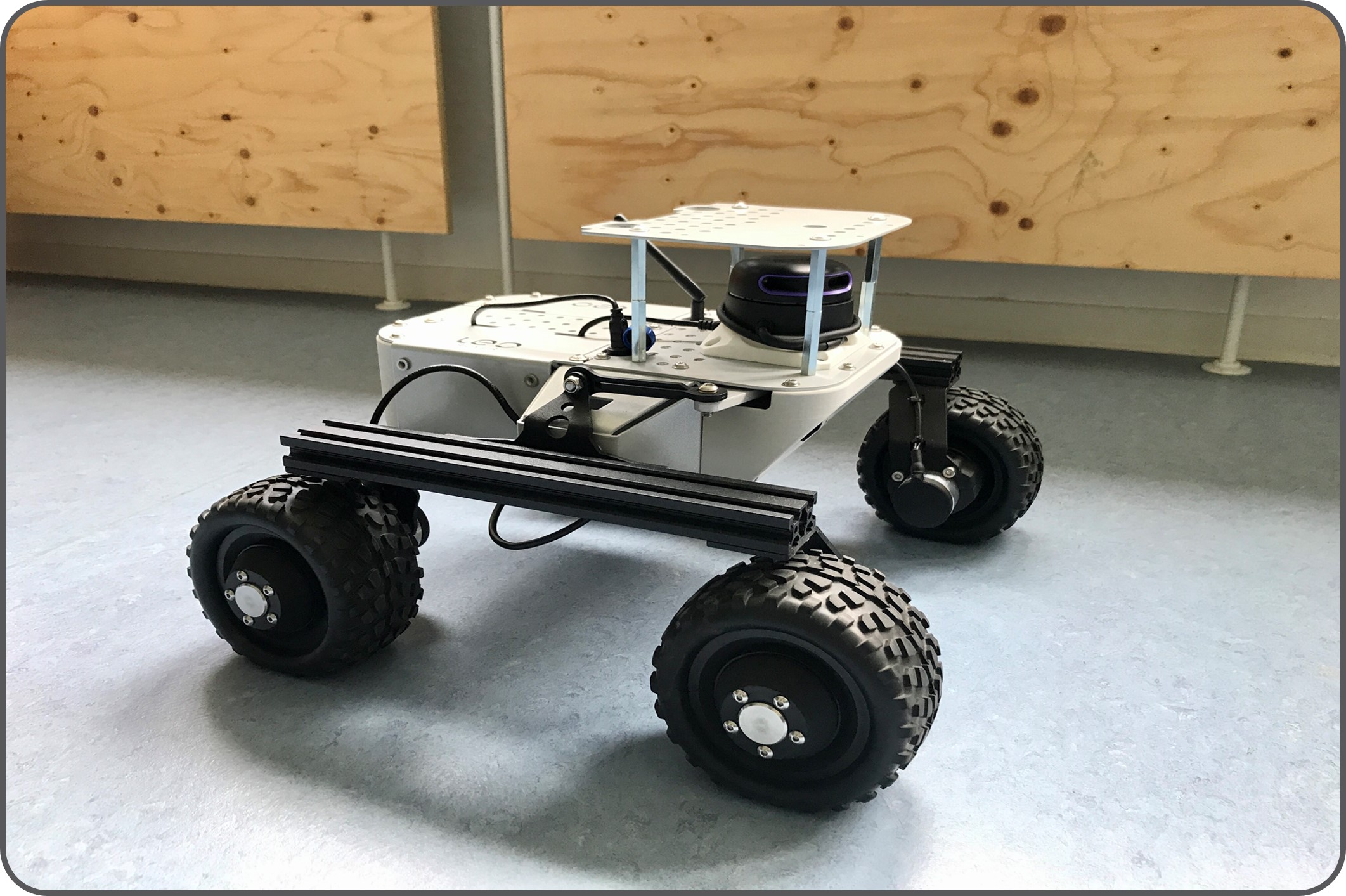
Der Leo Rover stellt einen mobilen Roboter dar, dessen Funktionsweise auf ROS Noetic (Robot Operating System) basiert. Der Rover ist mit einer Kamera, einem LiDAR-Sensor, einer 3D-Kamera sowie einem IMU-Sensor ausgestattet. Als Hauptsteuerungseinheit wurde ein Raspberry Pi 4 eingebaut, wodurch eine lokale Verarbeitung der Daten ermöglicht wird. Der Leo ist in der Lage, autonom oder semi-autonom eine Karte seiner Umgebung zu erstellen, welche anschließend für das vollständig autonome Fahren genutzt werden kann.
POTENZIAL & ANWENDUNGSBEREICHE
Die hinter dem "Leo Rover" stehende Technik lässt sich in verschiedene Anwendungsbereiche unterteilen.
Die Anwendungsbereiche umfassen:
- SLAM und Navigation
- Objektdetektion
- Reinforcement Learning
- Task Planning
- Schwarmintelligenz